当教室では、教育版LEGO® の最新ロボット、SPIKE™ シリーズを採用しています。
- LEGO® は、デンマーク語で「leg godt(よく遊べ)」という言葉を略したものです。
「LEGO® は子供のおもちゃ」と思ってはいけません。LEGO® のロボットには、産業革命以来、人類が積み上げてきた「メカニズムの歴史」が詰まっています。
歯車(ギア)、リンク機構、空気圧、そしてサスペンション。本物の自動車や産業用ロボットと同じ物理法則が、机の上で精確に再現されます。驚くほどの拡張性と奥深さが秘められています。
積み木ではなく「構造」を作る
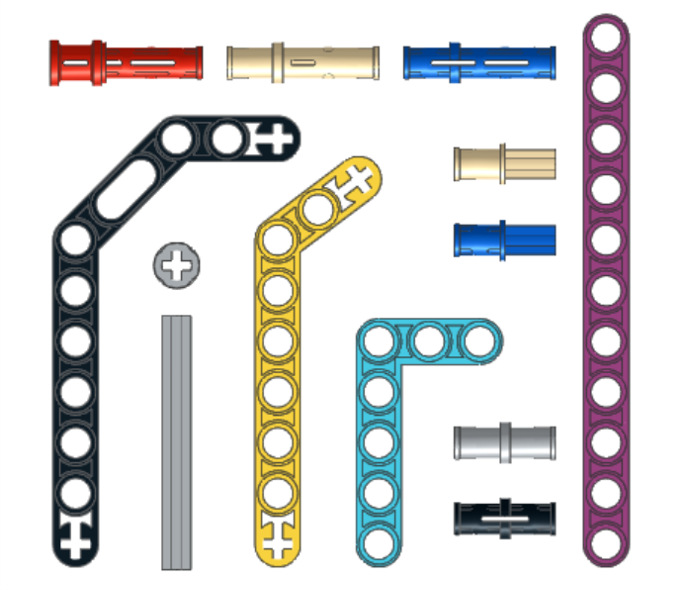
一般的なLEGO® は、ブロックを積み上げて形を作ります※。それに対して、ロボット制御で使うLEGO® Technic(テクニック)は、穴の開いたビーム(リフトアーム)とピン(ペグ)を組み合わせて「構造」を作ります。どう組めば歪まないか、どこを補強すれば軽くできるか。実際の建築や機械設計にも通じる、トラス構造やフレーム構造といった「構造力学」を、手を動かしながら直感的に体得できます。
- 一般的なブロックは、LEGO® System(システム)と呼ばれます。
工業製品レベルの「パーツ精度」
LEGO® のパーツは、マイクロメートル単位の極めて高い精度で作られています。安価な教材キットで起こりがちな「部品のガタつき」や「摩擦の違い」などのハードウェアトラブルが少ないです。ギアのかみ合わせも計算通りに動くため、純粋な「機構設計」や「プログラミング」の試行錯誤に集中することができます。
圧倒的な「開発スピード」
ネジも接着剤も使いません。アイデアを思いついたら数秒で形にでき、失敗したら一瞬で分解できます。実際の開発現場でも重視される「ラピッド・プロトタイピング(迅速な試作)」が、LEGO® 教材なら瞬時に可能です。この「試作スピード」の速さが、圧倒的な試行錯誤の回数を生み出し、深い理解へと繋がります。
機械工学を学ぶ「メカニズム」
ただモーターを回すだけではありません。回転運動を直線運動に変えたり、力を空気で伝えたり。機械工学の教科書に出てくる「機構」が詰まっています。
- 基本ギア・動力伝達
8枚歯から40枚歯まで、多様なギアを組み合わせて「ギア比」を計算します。「スピードを上げるか、パワー(トルク)を上げるか」。エンジニアリングの基本にして最大の課題である「トレードオフ」の関係を、実践をもって学びます。下表では、ギアの半径をLEGO® の単位であるスタッドで示しています。1スタッドは8mm。LEGO® のギアは「半径 = 歯数 ÷ 16」で設計されています。
歯数 8 12 16 20 24 28 36 40 半径 0.5 0.75 1 1.25 1.5 1.75 2.25 2.5 外観 





- リンク機構・クランク
モーターの回転を「歩く」「掴む」といった複雑な動きに変換します。生物のような滑らかな曲線の動きを創り出します。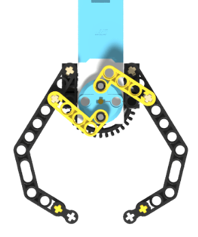
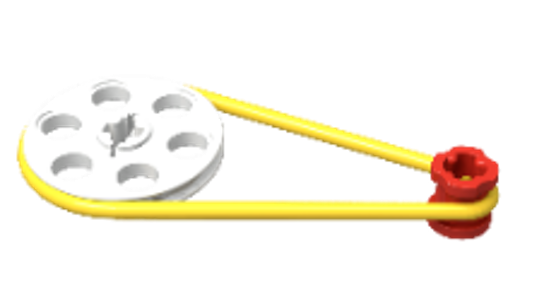
- ベルトドライブ・プーリー
離れた場所に動力を伝えたり、あえて「滑る」ことで過度な負荷からモーターを守るクラッチの役割を学んだりします。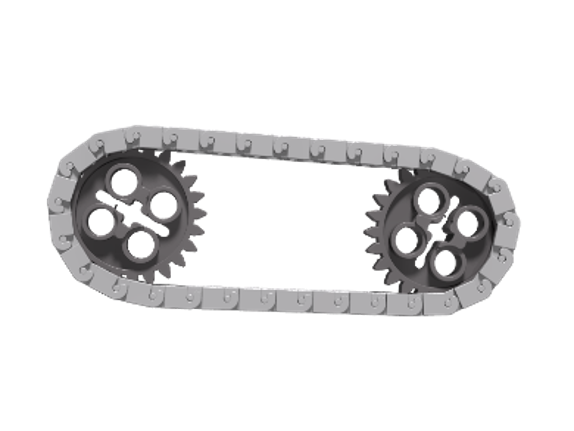
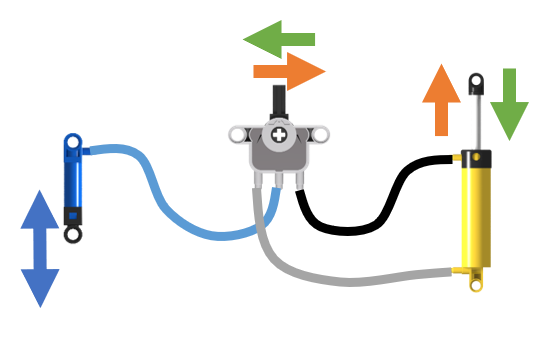
- リニアアクチュエータ・空気圧シリンダー
ショベルカー、ブルドーザー、ホイールローダーといった重機のように、重いアームを持ち上げる強力な「直線運動」を生み出します。
リニアアクチュエータでは、モーターで内部のねじを回すことで、直線運動を行います。一方、空気圧シリンダーでは、クランクで回したポンプからの空気圧を動力に、直線運動を行います。
- ラック&ピニオン
回転するギア(ピニオン)と棒状のギア(ラック)を組み合わせ、回転運動を直線運動に変換します。フォークリフトの昇降や、プリンターのようにペンを左右に動かして図形を描く精密な制御を学びます。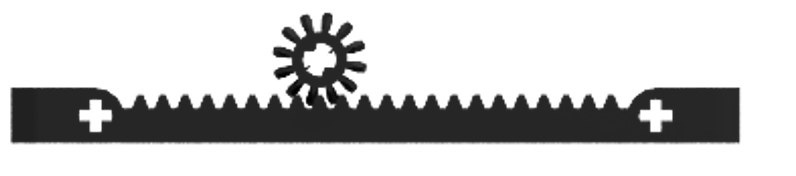
移動ロボットの形
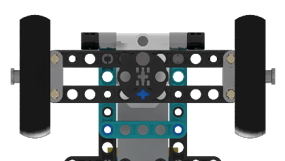
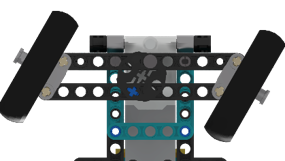
ロボットでは足回りの設計は戦略の要です。当教室では、「ドライブベース(対向2輪)」と「ステアリング」という2つの基本形を中心に、ミッションや環境に合わせて最適な機構を構築します。
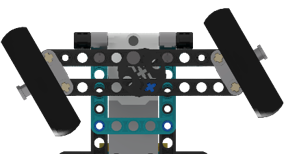
- ドライブベース(対向2輪)
標準的な移動ロボットです。ロボット掃除機もこのタイプです。左右のモーターを独立制御し、その場で回る「超信地旋回」が可能です。足回りのパーツを変えることで、様々な環境に対応します。- タイヤ型
小回りが利き、スピードが出せる標準タイプ。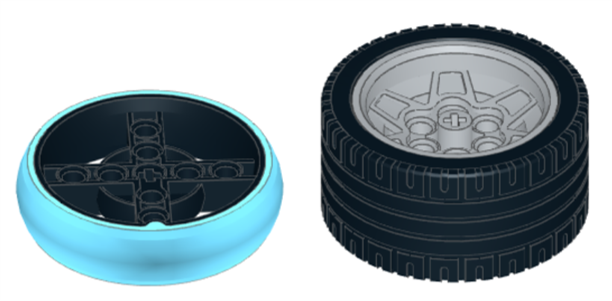
- クローラー型(タンク)
接地面積が広い無限軌道タイプ。制御理論はタイヤ型と同じですが、段差や凸凹道などの悪路走破性に優れています。
- タイヤ型
- ステアリングカー(アッカーマン・ジャントー)
実際の自動車と同じように、前輪の角度を変えて曲がります。ドライブベースのようにその場での旋回ができないため、内輪差を計算したり、切り返し(車庫入れ)を行ったりと、幾何学的な経路計画が必要になります。 - 全方位移動(オムニホイール)
特殊なローラーが付いたタイヤを使用します。車体の向きを変えずに「真横」や「斜め」に並進移動が可能なため、移動時間を短縮できます。上記の2系統とは異なり、ベクトル制御を用いた高度な数学的アプローチに挑戦します。
これらのロボットではタイヤ・クローラーの選定が重要になります。ドライブホイール(スプロケット)直径によるスピード・パワー変化だけでなく、幅や断面形状(点・線・面接触)による摩擦の違いも学びます。旋回性能を重視するか、グリップ力を重視するか、エンジニアリング視点で最適なタイヤを選定します。当教室は通常のキットに入っていない、様々な種類のタイヤ・ベルトを用意していますので、様々な条件に合わせた選定が可能です。
本物のクルマに通じる仕組み
クルマの基本構造を再現することで、機械が動く仕組みを深く理解します。
- ステアリングシステム
リンク機構を使い、ステアリングを変える仕組み(アッカーマン・ジャントー)を再現。「なぜクルマはスムーズに曲がれるのか?」を理解します。
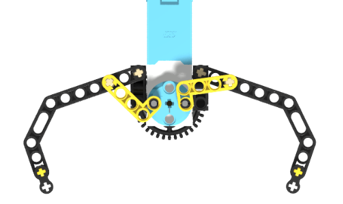
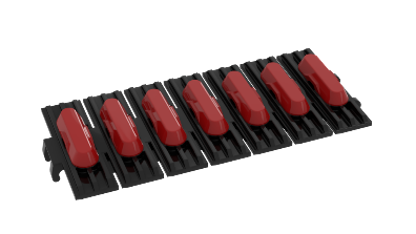
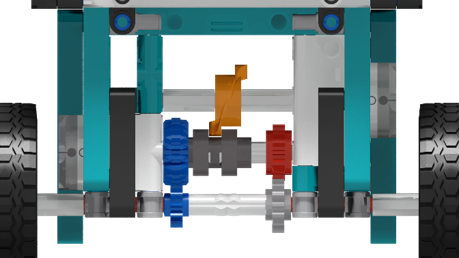
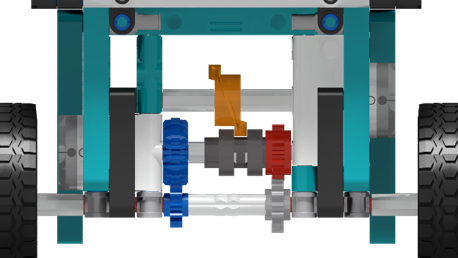
- トランスミッション(変速機)
クラッチギアやドライビングリングを使い、走行中にギアを切り替えます。「坂道を登るパワー」と「直線のスピード」を状況に合わせて変える、変速機構の仕組みを学びます。下図では、ロータリーキャッチ(オレンジ)を回転させて、ドライビングリング(グレー)を左右どちらかのクラッチギア(青・赤)につなげて、変速しています。
- デファレンシャル・ギア(差動装置)
カーブを曲がる際、内側と外側のタイヤの回転差を吸収する「デフ」の仕組みを再現。ステアリングと合わせてクルマの旋回原理を学びます。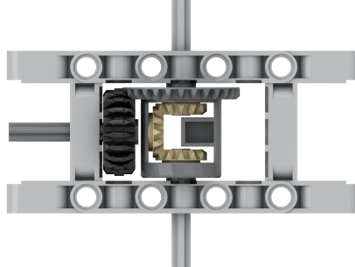

- サスペンションシステム
バネを使って路面の衝撃を吸収したり、車体の傾きを制御したりします。質量の移動や振動といった物理現象を体験します。
ハブとモーターとセンサー
LEGO® の SPIKE™ シリーズでは、目的に合わせて2つのハブ(コンピューター)、3つのモーター、3つのセンサーを使い分けます。ハブには「加速度(G)」と「角速度」を測るジャイロセンサー、モーターには「回転角」を測る角度センサーが内蔵されています。
SPIKE™ シリーズの簡単な SPEC 一覧を、下表に示します。
- ハブのポート数は、モーターとセンサーを接続できる数を表しています。
- ハブには、Bluetooth による通信機能が搭載されており、PC だけでなくコントローラーとの接続やハブ同士の通信が可能です。ただし、Pybriks を使用している場合に限ります。
- ハブはマイクロ USB により、PC との接続や充電を行います。
- ハブはどちらも32MB メモリを搭載しているため、ハブにプログラムをダウンロードすれば、ロボット単体で動かすことができます。ただし、スモールハブは Pybriks を使用している場合に限ります。
- モーターの性能は、無負荷時の速度と停動トルクで記載しています。
- センサーに記載されているライトマトリクスは、センサーでなくディスプレイです。ディスプレイの無いスモールハブのために追加されたブロックです。
| ハブ | 役割と外観 | ポート数 | 内蔵 センサー | ディスプレイ | スピーカー |
| スモールハブ (ベーシック) | コンパクト ロボット用  | 2ポート | 6軸 ジャイロ センサー | なし | なし |
| ラージハブ (プライム) | 高機能ロボット用 | 6ポート | 5×5マトリクス (ハブ本体) | 12ビット16 kHz (モノラル) |
| モーター | 外観 | 性能 | 内蔵 センサー | 特徴 |
| S モーター | スピード:★☆☆ (660 deg/s) パワー :★☆☆ (50 mNm) | 回転角度 センサー | 力が弱くても できる動きに。 コンパクトで 使いやすい。 |
|
| M モーター | スピード:★★★ (1110 deg/s) パワー :★★☆ (180 mNm) | 大きいロボットの タイヤを回す。 少し力の必要な アームを動かす。 |
||
| L モーター | スピード:★★☆ (1050 deg/s) パワー :★★★ (250 mNm) | 重機のアームや 移動機構等の力が 必要な部分に。 |
| センサー | 外観 | 役割 | 使用例 |
| カラー センサー | 色や反射率を 調べる | 白黒の境界線を走る 「ライントレース」。 黒や赤まで進む。 色による仕分け。 |
|
| 距離 センサー | 障害物との 距離を測る | 壁に近づいたら止まる。 迷路で左右のどちらが 曲がり角か調べる。 壁と距離を保ちつつ走る。 |
|
| フォース センサー | 力の大きさを 測る | ON/OFFのスイッチ。 壁にぶつかったら止まる。 |
|
| ハブ内蔵 6軸ジャイロ センサー | ー | XYZ方向の加速度と 角速度の測定 | ロボットの直進や 回転のズレをなくす。 ロボットの傾きや 揺れを検知する。 コントローラー。 |
| モーター内蔵 角度センサー | ー | 絶対・相対 回転角の測定 | 移動距離の測定。 ダイヤル入力。 負荷を検知して止まる。 アーム初期位置合わせ。 |
| ライト マトリクス | 3×3 マトリクスの ライト | 9マスを様々な色に光らせて ロボットの状態を知らせる。 |
この他にも、盛りだくさん!
ここで挙げた以外にも、様々なメカニズムやブロックがあり、当教室のカリキュラムである「ブラックボックス」の学習(物理 × 論理)に直結しています。なぜその機構が必要なのか?物理法則と照らし合わせながら、その意味を解き明かしていきます。
研究室でも活躍するLEGO®
実は、最先端の研究開発現場でもLEGO® は活躍しています。
- Googleのサーバーは、LEGO® 製だった
Googleの創業時、最初のサーバーラックがLEGO® ブロックで作られていました。「必要な形をすぐに作れて、放熱性も高く、拡張しやすい」。このエンジニアリングの基本である「ラピッド・プロトタイピング(迅速な試作)」に、LEGO® は最適だったのです。 - 科学実験を変える「Technic」の精度
さらに高度な実験現場では、「LEGO® Technic」が使われています。例えば、原子を見るための「原子間力顕微鏡」や、血液検査に使う「遠心分離機」。これらは通常、数百万〜数千万円する高価な機器ですが、Technicの「精密なギア機構」と「高い剛性」を利用して、同等の機能を持つ実験装置を自作する研究が、世界中の大学で行われています。 - 驚きの「金型精度」
なぜそんな精密なことができるのか。それはLEGO® を作る「金型」の精度が0.005mm(5ミクロン)という驚異的な精確さで作られていると言われています。この品質管理があるからこそ、部品のガタつきがなく、計算通りのロボットを作ることができるのです。